
26. 簡易一軸ローテーターの予備検討 1.(衛星追尾用) de JA1CPA 中村 2018/10/13
一般的に衛星追尾をするローテーターは,方位ローテーターと仰角ローテーターを組み合わせて使用している。
この場合は天頂付近で方位ローテーターが反転(約180°)することにより偏波面も約180°変化し衛星からの信号に落ち込みが生じることがある。
また方位ローテーターと仰角ローテーターの2つが必要になり価格,重量が増して移動運用する場合は好ましくない。
そこで多少の方位,仰角に誤差が有っても一つのローテーター(一軸)で, 方位,仰角が出来ないか検討した。
ただし,思い違いでNGかも知れないので何らかの方法で実験したいと思っている。
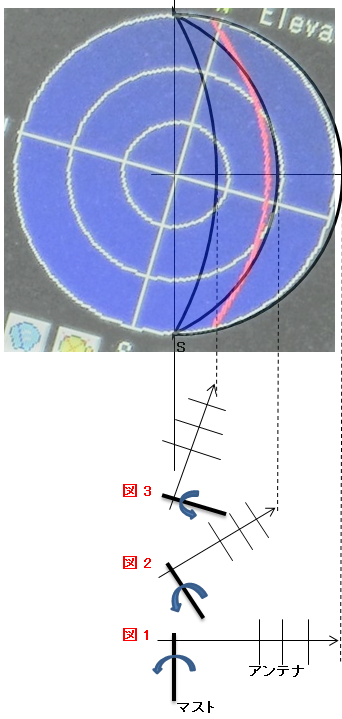
左図の赤線はCALSAT32,AO-92,MEL38°の軌跡である。
左図下部にマストにアンテナを90°で固定した状態を示す。図のアンテナは分かりやすくするために垂直偏波に書いているが,実際の設置は水平偏波に設置する。
図 1 の状態でマストを回転させるとアンテナは水平偏波で水平線方向に沿って回転する。
次にAO-92,MEL38°を追尾する時は,マストを約38°(少しマイナスに)傾けて(図2)アンテナが38°(少しマイナスに),その時のAzに設置する。(真の方向とはズレる?)
マストを回転させてAOS方向で水平にして待機する。
AOSになるとアンテナは左図の真ん中の黒線に沿って回転することになる。(直線かな?)
この黒線の軌跡とAO-92の軌跡は少しずれがあるが,移動運用で使うアンテナは5~6エレメント程度なのでビームのずれによる落ち込みはほとんど無いと考えている。
また地上高が低いので垂直面パターンは大きく変わる。
図3はMEL65°ぐらいのアンテナ軌跡。
天頂付近を通過する場合は,マストをほぼ水平にする。アンテナは垂直偏波のまま回転しアンテナの偏波の反転による落ち込みは無くなる。
これが実用になれば方位ローテーターだけで衛星追尾ができる。
固定設置の場合は,何らかの方法でマストの傾斜機構が必要になる。(仰角ローテーターよりたいへんかも?。このマスト傾斜を仰角ローテーターでやることになるかも!)
市販の方位ローテーターを使って実験できればと思っている。(CALSATも使える!)
なお、1200MHzの小型アンテナで有れば市販の小型オームギヤ付きモーターで自作も可能ではないかと考えている。移動運用であれば逆荷重はあまり考えなくて良いのではないか。
やっぱりNGだ!となるかもしれないので試作しないでください。hihi
↓下の模型写真で確認する。2018/09/30






AOS AOS-MEL間 MEL45° MEL-LOS間 LOS
マストの下部に回転機構(2rpm程度のギヤモーターを付けて500Ωボリュームをマストと同時回転)を付けてCALSAT32のフリップモードで仰角制御する。
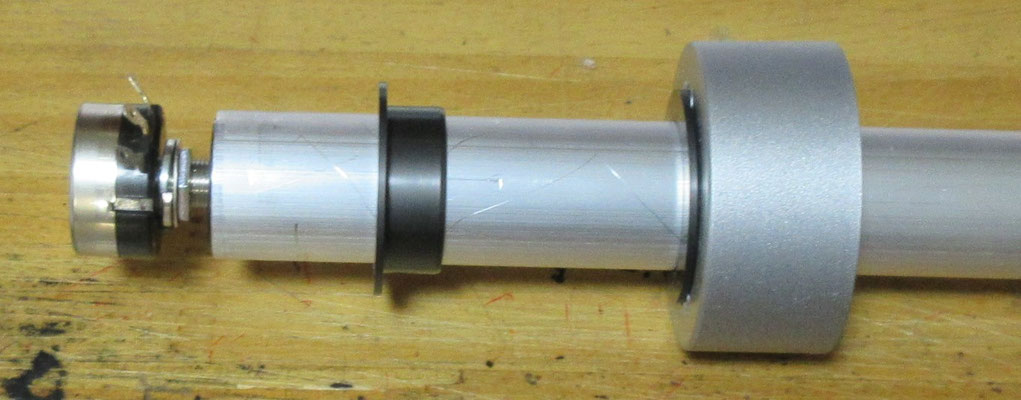
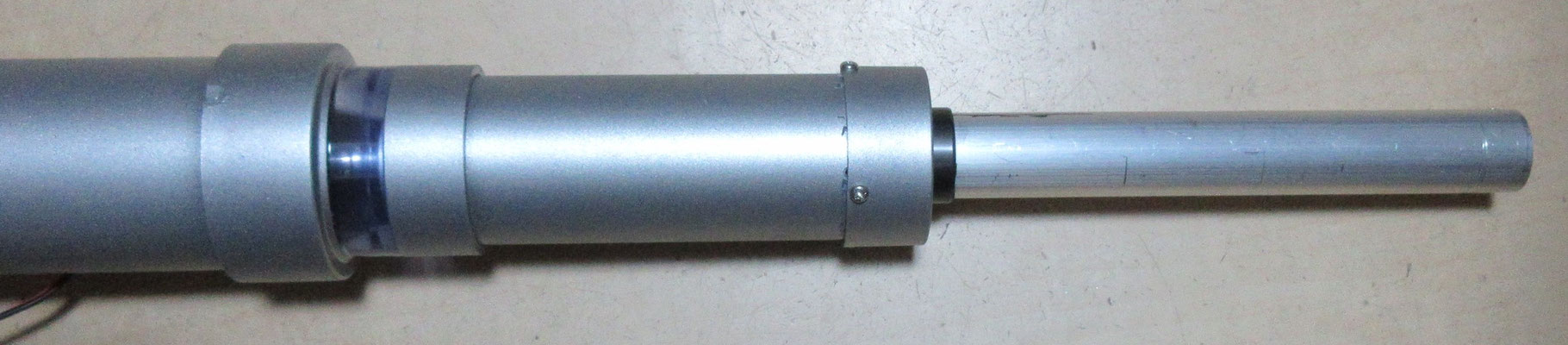
↓↓この目的にピッタリの「移動運用・ローテーター」を入手しました。↓↓ 2018/9/30

↑電池ケースと手動スイッチ 最大径67mm、長さ570mm↑ 右側の細い部分(φ25)が2rpm(1分間2回転)程度で回転します。↑
乾電池(単3を6本、9V,50mA程度)で動きます。小型アンテナ専用です。電圧を可変することにより回転数が変化します。
トルクは大きいようですが,アンテナ側からの逆力(風力)には弱いようです。ダイヤモンドの430MHz 10eleスタック程度のアンテナは駆動できるようです。回転止め(リミットスイッチ等)は有りません。回転部分に小さいペットボトル上部を付けて防雨対策します。正逆回転のバックラッシュが有ります。クラッチ部をV溝(将棋駒型溝)にすると軽減する可能性が有ります。回転検出のボリュームが付けられないので,当面は手動でやってみます。
方位と仰角目盛りの付いた三脚を探します。同じ回転数のモーターで500Ω(RA25Y20S501)ボリュームを回転出来れば角度検出してCALSA32に入れてやれば,このモーターのON/OFF制御ができる可能性が有ると思います。
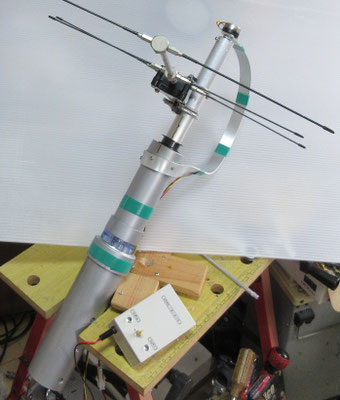
↓↓実際にアンテナを付けて廻してみました。↓↓ 2018/10/1





AOS AOS-MEL間 MEL約45° MEL-LOS間 LOSまじか
435MHz 8eleを三脚に付けて廻してみました。(MEL付近でガタが有るの,MEL通過後にガタンとなる) スイッチで手送りでもOKか!
実際の衛星ではAOS/LOS付近は遅く,MEL付近は早くなる。非線系に廻せればCALSATは不要になるかも! MEL30°,60°,天頂,の3種類有れば良い。
とりあえず,MEL45°固定にして先端に回転検出ボリュームを付けることにしました。

↑回転角度検出用ボリューム(コスモス,RA25Y20S501,巻線型500ΩB)に外径22.5mmのツマミを付けてパイプにピッタリ入ります。
25mmパイプには,フランジブッシュ(モノタロウ,オイレス#80,品番80F-2510,注文コード00461072)がピッタリ入ります。
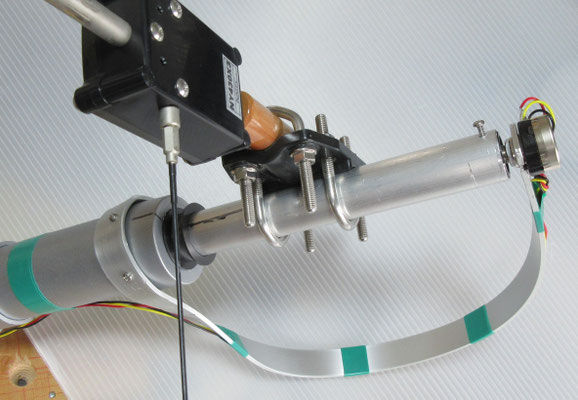
↑ これを三脚に付けて主軸を45°に傾けて,アンテナを左右に±90°(180°)回転すると先端の回転角度検出ボリュームが共に回ります。
ただし、アンテナの重力が回転角度検出ボリュームに加わるのであまり良い方法ではない。


↑バネ(モノタロウ、サミニ 圧縮スプリング(ピアノ線,ばね鋼線・11-3225)を入れてキャップを3方向からM3✕6タッピングネジで止める。
この方法は,すでに完成した方位ローテータを使ったので回転検出機構に無理があり,別途 衛星追尾用を検討することにした。
おわり

JA1CPA