
27. 簡易超小型ローテーターの検討 2.(衛星追尾用) 工事中 2020/4/17再検討

検討中
1. ギヤ:8AGA-HGKC レインボープロダクツ 平ギヤ 1.0モジュール
歯50×6mm穴(アルミボス) 91660 (せんごくネット通販)
2. ギヤ:6A5A-HGKW レインボープロダクツ 平ギヤ 1.0モジュール
歯30×6mm穴(アルミボス) 91640 (せんごく,)
3. ジョイント:Lovoski 剛性 アルミ合金 カップリング 対称
カー ボートモデル コネクター 金型 メンテナンスフリー
26パタン選べ - ライトブルー, 6-6mm (a-z,)
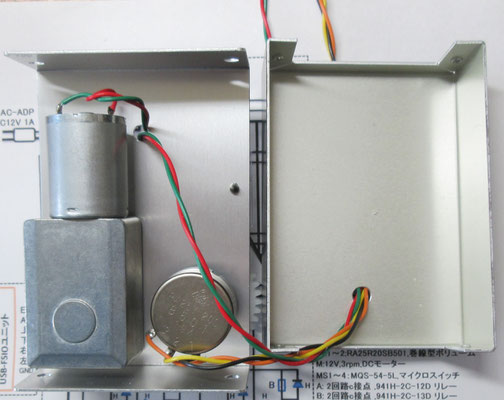
4. ボリューム:コスモス,RA25Y20S501,巻線型500ΩB (AKB,)
5. モーター:Bringsmart 12v DC モーター 小型 3rpm, 6V ギヤード
モーター 軸 直径6MM, バーベキューショー回転テーブルステージ
照明自動販売機自動カーテンロボット自動装置 (12V 3RPM) (a-z,)
1.方位、仰角ローテーターの試作 2020/4/17



↑↑ボリューム(500Ω)は300°しか回転しないのでモーター(アンテナ)を360°回転させたときにボリュームが300°になるように30歯:40歯で回転を変換する。ただし回転方向は反対になる。
モーター(アンテナ)が0°又は方位360°(仰角180°)以上回転した時のリミットスイッチをマイクロスイッチにした。
右回転で360°(仰角180°)以上になった時にそれ以上左に回転しないようにマイクロスイッチを付けて停止させる。(右回転で解除する)
左回転で方位0°以下になった時にそれ以上右に回転しないようにマイクロスイッチを付けて停止させる。(左回転で解除する)
これを2台作って直角に配置すれば方位,仰角がCALSAT32でコントロールできる。はず!!!



↑↑仰角0°過ぎ停止 ↑約50°付近 ↑↑180°過ぎ停止 2020/4/18
仰角モーターが左に回って(0°)を過ぎたところで右側のマイクロスイッチがOFFして停止した。
(モーターの±を反転して右回転にすると動き出す)
仰角モーターが右に回って(180°)を過ぎたところで左側のマイクロスイッチがOFFして停止した。
(モーターの±を反転して左回転にすると動き出す)
ストッパーはM4圧着端子を使った。取付角度を調整して(0°)(180°)過ぎを調節した。
なお,モーターとボリュームの回転方向がギヤで反転するので全ての動作が反転する感じ!。
あくまでもモーター(アンテナ)の回転方向を基準にする。

2020/6/2
方位と仰角を組み込んだところ。
制御系はこれから。

JA1CPA